
رباتی که میتواند مانند یک سمندربدود وشنا کند
متن سخنرانی :
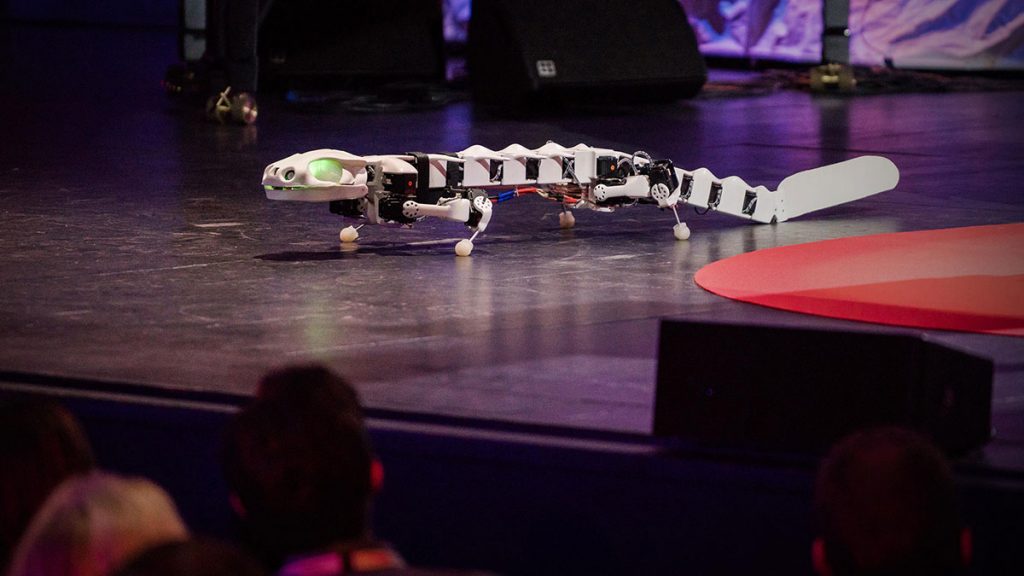
این پولو روبات است. این روباتی است که ما طراحی کردیم تا حدزیادی حرکات یک گونه سمندر را با نام پولورودل والت تقلید کند. این روبات میتواند راه برود، وهمانطورکه بعدا خواهید دیدشنا هم میکند.ممکن است بپرسید چرا این رباترا طراحی کردیم؟ ودرواقع این روبات به عنوان یک ابزار علمی برای علوم اعصاب طراحی شده. در واقع آن ر ابا کمک متخصصان شبکهعصبی طراحی کردیم تا بتوانیم نحوه حرکت حیوانات را بفهمیم، به ویژه اینکه چگونه نخاع حرکت را کنترل میکند. اما هرچه بیشتر درحوزه رباتیک زیستی کار میکنم، بیشترتحت تاثیرسیستم حرکت جانوران قرار میگیرم. اگرشما به شنای یک دلفین یا به دویدن و اینسو و آنسو پریدن گربه یاحتی ما انسانها فکر کنید، وقتی میدوید و یا تنیس بازی میکنید، کارهای خارق العاده میکنیم. و در واقع سیستم عصبی ما مساله بسیار بسیار پیچیده کنترل را انجام میدهد. این سیستم باید به طوربی نقص حدود ۲۰۰ماهیچه را هماهنگ کند. چون اگر هماهنگی نادرست باشد زمین میخوریم یا نمیتوانیم به درستی حرکت کنیم. و هدفم این است که بفهمم این سیستم چگونه کار میکند.
چهار بخش اصلی در حرکت حیوانات دخیل هستند. اولین بخش بدن است و هرگز نباید دست کم بگیریم که تا چه اندازه مکانیک زیستی حرکت را در حیوانات ساده کرده است. بخش بعدی نخاع است، در نخاع رفلکسها اتفاق میافتند، رفلکسهای متعددی که حلقه هماهنگی حسی حرکتی را بین فعالیت عصبی درنخاع و فعالیتی مکانیکی خلق میکنند. بخش سوم تولید کنندههای الگوی مرکزی هستند. اینها مدارهای بسیار جالبی در نخاع مهرهداران هستند که میتوانند به تنهایی الگوهای فعالیت منظم بسیار هماهنگ شده تولید کنند، در حالی که سیگنالهای ورودی بسیار سادهای دریافت مینمایند واین سیگنالها که از بخشهای بالایی مغز مانند قشر حرکتی، مخچه و هستههای قاعدهای میآیند، همگی فعالیت نخاع را وقتی ما حرکت میکنیم تغییر و کنترل میکنند. اما جالب است این است که تا چه حد یک بخشسطح پایین یعنی نخاع همراه با بدن بخش عمدهای از مساله حرکت را حل میکنند. شما احتمالا میدانید کهپس از قطع سر یک مرغ هنوز میتواند مدتی بدود که حاکی از آن است که نخاع و بدن بخشعمدهای از مساله حرکت را میتوانندحل کنند.
حالا درک این موضوع بسیار پیچیده است زیرا اولاً ثبت فعالیتهای نخاع بسیار مشکل است. قراردادن الکترود در قشاء حرکتی بسیار راحتتر است تا در نخاع، چون که توسط ستون فقرات محافظت میشود. به ویژه در انسانها بسیار دشوار است. مشکل دوم آن است که حرکت حاصل یک تعاملبسیار پیچیده و فعال بین این چهار بخش است لذا پی بردن به اینکه نقش هر یک در اینفرایند چیست بسیار دشوار است. این همان جایی است که رباتهای زیستی مانندپولوروبات ومدل های ریاضی واقعا میتوانند کمک کننده باشند.
خوب رشته ربات زیستی چیست؟ رشته ربات زیستی یک رشته بسیار فعال در حوزهرباتیک است که درآن میخواهیم از حیوانات الهام بگیریم تا روباتهایی بسازیم که بیرون میروند، مثل روباتهای خدماتی و یا جستجو و نجات یا رباتهای میدانی وهدف بزرگ آن است که از حیوانات الهام بگیریم تا رباتهایی بسازیم که درمکانهای پیچیده مانند پلههاکوهها-- و جنگلها و جاهایی که آنها هنوز مشکل دارند میتوانند حرکت کنند وجاهایی که حیوانات خیلی بهترعملمیکنند. ربات میتواند یک ابزار علمی فوق العادهنیز باشد. پروژههای بسیار خوبی وجود دارند که رباتها مورد استفاده قرار میگیرند، مثل یک ابزارعلمی برای علوماعصاب، مکانیک زیستی، ویا هیدرودینامیک و این دقیقا هدف ساخت پولوروبات است. خب آنچه در آزمایشگاه من انجام میدهیم همکاری باعصبشناسانی مثل جین ماری کابل گوئن از بوردوفرانسه است، وما میخواهیم مدلهایی از یک طناب نخاعی درست کنیم و روی رباتها آنها را تست کنیم. و قصد داریم ساده شروع کنیم.
لذا بهتر است با حیوانات ساده شروع کنیم مثل مکنده ماهی که ماهیانی بسیارابتدایی هستند، وکم کم به سمت حرکات پیچیده تر برویم، مثل حرکت سمندر و همینطور حرکت گربهها وانسانها و پستانداران. ودر اینجاست که یک روبات یک ابزار جالب میشود تا بتوانیم مدلهایمان را اعتباربخشی کنیم. و برای من پولروبات نوعی رویای به واقعیتپیوسته است. مثل حدوداً بیست سال پیش در دوران تحصیلات دکتری که روی یک کامپیوتر حرکات مکنده ماهی و سمندر را شبیهسازی می کردم. اما همیشه میدانستم که شبیهسازیهای من فقط تقریبی هستند. مثل شبیه سازی فیزیک در آب، یا گل ویازمینهای پیچیده، شبیهسازی آن به طور صحیح در کامپیوتر بسیار دشوار است. چرا یک روبات و فیزیک واقعی نداشته باشیم؟ خب بین همه این حیوانات سمندر مورد علاقه من است. ممکن است بپرسید چرا ودلیلش آن است که به عنوان یک دوزیست از دیگاه تحولی یک موجود واقعاً کلیدی است. یک حلقه شگفتانگیز بین شنای مارماهیها و یا ماهیها و حرکت چهار پایان مانند آنچه در پستانداران،گربهها و انسانها میبینید. ودر واقع سمندر امروزی بسیار شبیه به مهرهداران اولیه در خشکیاست، لذا تقریباً یک فسیل زنده است، که امکان دسترسی به اجداد ما را میدهد، اجداد همه چهارپایان خشکی.
بنابراین سمندر شنا میکند با انجام آنچه آن را حرکت موجی هنگام شنا مینامیم، لذا آنها یک موج ناشی از حرکت ماهیچهای را ازسربه دم میفرستند. واگرشما سمندر را روی زمین بگذارید، حرکتش به آنچه آن را حرکت یورتمهای مینامیم تبدیل میشود. دراین حالت شما فعال سازی متناوب اعضا را دارید
که بسیارجالب باحرکت موجی بدن هماهنگ هستند. واین دقیقا همان حرکتی است که شما در پولوروبات میبینید. حالا آنچه بسیار متحیر کننده و شگفت انگیزاست آن است که همه اینها فقط توسط نخاع و بدن تولیدمیشوند. لذا اگر یک سمندر بدون مغز را بردارید -- خیلی جالب نیست اما شما سرش راجدا میکنید-- و اگرنخاع را تحریک الکتریکی کنید، با اندکی تحریک حرکت شبیه راه رفتن ایجاد میشود. اگر شما کمی بیشتر تحریک کنید،حرکت سریع تر می شود. و در یک آستانه تحریک، بطور خودکار حرکت حیوان شبیه شنا میشود. حیرتانگیز است. تنها با تغییر در حرکت عمومی گویی شما در حال فشردن پدال گاز حرکت موجی کاهشی نخاع هستید، تغییر بین دو نوع حرکت کاملا متفاوت بوجود میآید. در واقع چنین رفتاری در گربهها نیزمشاهده شده است. اگر شما نخاع یک گربه را تحریک کنید حرکات راه رفتن، یورتمه رفتن ودویدن بوجود میآید. یا در پرندگان، میتوانید با تحریک اندک راه رفتن را بوجود آورید، ویا بال زدن با تحریک بیشتر. و این درواقع حاکی از آن است که نخاع یک کنترل کننده بسیارپیشرفته حرکت میباشد.
بنابراین حرکت سمندر را با جزئیات بیشترمطالعه کردیم، درواقع یک دستگاه فیلم برداری با اشعه ایکس داشتیم که توسط پروفسور مارتین فیشر از دانشگاه جنا در آلمان در اختیار ما قرار گرفت. و این یک ماشین فوقالعاده برای ضبط تمامی حرکات استخوان با جزئیاتاست. این کاری است که کردیم. خب در ابتدا مشخص کردیم که کدام استخوانها برای ما مهم هستند و حرکت آنها را به شکل سه بعدی ضبط کردیم. آنچه انجام دادیم جمع آوری یکبانک اطلاعاتی از حرکات، هم بروی زمین وهم درآب بود، جمعآوری یک بانک اطلاعاتی کامل از رفتار حرکتی که یک حیوان میتواند انجام دهد. و پس از آن، کار ما به عنوان متخصص ربات بازسازیشان در ربات ما بود. لذا طی یک فرایند کامل بهینه سازی پی بردیم ساختار درست چیست و اینکه موتورها را کجا قرار دهیم وچگونه آنها را به هم وصل کنیم، تا بتوانیم به بهترین شکل بازسازی کنیم. واین چنین بود که پولوروبات متولد شد.
خب ببینیم تا چه حد به حیوان واقعی نزدیک است. لذا آنچه اینجا میبینید تقریبا یک مقایسه مستقیم بین حرکت پولو روبات و حیوان واقعی است. همانطور که میبینید دقیقا تمامی حرکات را کپی برداری کردهایم. اگر به عقب برگردید باحرکت آهسته بهترقابل مشاهده است. اما حتی بهتراز این شنا هم میکند. لذا یک لباس شنای مخصوص به روبات پوشاندیم--
(خنده)
و بعد ربات را در آب گذاشتیم که میتواندحرکات شنا را انجام دهد. ودر اینجا بود که خیلی خوشحال شدیمچون کار بسیار سختی است. قوانین فیزیکی حاکم بر تعامل بسیار پیچیده هستند. روبات ما بسیار بزرگتر از یک حیوان کوچک است، لذا مجبور بودیم کاری کنیم که به آن مقیاسبندی دینامیک فرکانسها مینامند تا مطمئن شویم همان فیزیک تعاملی را داریم. و شما میبینید که یک نمونه بسیارمشابه داریم، و از این موضوع بسیار خوشحال بودیم. خب بیاید برویم سراغ نخاع. خب آنچه ما با جین ماری کابل گوئنانجام دادیم مدل سازی مدارهای نخاع بود. وآنچه جالب است این است کهسمندر مدار بسیار ابتدایی را حفظ کرده است، که مشابه آن را در مکنده ماهی میبینیم، این ماهی شبیه مارماهی، وبه نظر میرسد که در مسیر تحول، اوسیلاتورهای عصبی جدیدی اضافه شدهاند تا اعضا را کنترل کنند، تا حرکت پاها را کنترل کنند. و میدانیم این اوسیلاتورهای عصبی کجا هستند، اما آنچه انجام دادیم ایجاد یک مدل ریاضی بود تا ببینیم چطور باید با هم جفت شوند تا انتقال بین این دونوع حرکتامکانپذیر باشد. و ما آن را روی برد ربات آزمودیم.
و این چنین شد. خب آنچه شما اینجا میبینید نسخه قبلی پولوروبات است که کاملا توسط مدل نخاعی ما که بر روی برد ربات برنامه ریزی شده کنترل میشود. و تنها کاری که ما میکنیم فرستادن به ربات ازطریق یک کنترل از راه دور دو سیگنال ارسالی ازبخش بالایی مغز استکه معمولا باید دریافت کند. و جالب اینجاست که با بازی کردن با اینسیگنالها ما میتوانیم کاملا سرعت، جهت و نوع حرکت را کنترل کنیم. مثلا وقتی در سطح پایین تحریک صورت میگیردما راه رفتن را داریم، و وقتی زیاد تحریک صورت میگیرد، بسیار سریع راه رفتن به شنا تبدیل میشود. و درنهایت ربات ما بسیار زیبا میچرخد، آنهم فقط از طریق تحریک بیشتر یک طرف نخاع. و به نظر من این بسیار زیباست که چگونه طبیعت کنترل را توزیع کرده تا مسئولیت بسیار زیادی به نخاع بدهد بگونه ای که بخش بالایی مغز لازم نیست نگرانتک تک ماهیچهها باشد. مغز تنها لازم است نگران مدولاسیونسطح بالا باشد، و این واقعا وظیفه نخاع است تا هماهنگی بین ماهیچه ها را انجام دهد.
خب حالا برویم سراغ حرکت گربه و اهمیت مکانیک زیستی. خب این یک پروژه دیگراست که در آن ما مکانیک زیستی گربه رامطالعه کردیم، و قصد داشتیم بدانیم تاچه اندازه شکل بدنبه حرکت کمک میکند. ما سه معیار مهم در خصوصیات، دست وپای گربه یافتیم. اولین معیار آن است که دست وپای گربه کما بیش مثل یک پانتوگراف عمل میکند پانتوگراف یک وسیله مکانیکی است که همواره بخش بالایی را با بخش پایینی موازی نگه میدارد. یک سیستم هندسی که به نوعی کمی هماهنگ کننده حرکات داخلی اجزا است. ویژگی دوم دست وپای گربه آن است که خیلی سبک هستند. بیشتر ماهیچهها در بخش بدن قرار دارند، که ایده خوبی است زیرا در این صورت دست وپااینرسی کمی دارند ولذا میتوانند سریع حرکت کنند. آخرین و مهمترین ویژگی رفتار انعطاف پذیردست وپای گربه است، تا بتواند فشار و نیروهای وارده را مدیریت کند. وبدین ترتیب بود که ما بچه یوزپلنگ راطراحی کردیم.
اجازه بدهید آن را به رویصحنه دعوت کنیم. این پیتر اکرت است که به عنوان پروژه دکتری خود روی این روبات کار میکند، همانگونه که میبینید رباتی زیبا و کوچک است. شبیه یک اسباب بازی است، اما واقعا به عنوان یک ابزارعلمی ازآن استفاده شد تا خصوصیات پاهای گربه مورد بررسی قرار گیرد. همانگونه که میبینید بسیارشبیه گربه و سبک است، و بسیار انعطاف پذیر است، شما میتوانید بدون اینکهبشکند به آن فشار وارد کنید. درواقع خواهد پرید. و این انعطاف پذیری بسیار مهم است. و شما خصوصیات سه بخش پا را که مثل پانتوگراف است میبینید.
آنچه جالب است این است که این حرکت کاملا دینامیک از طریق یک حلقه باز صورت میگیرد، بدین معنی که هیچ حسگری ویا هیچ حلقه بازخوردی پیچیدهای وجود ندارد. و این جالب است زیرا بدین معنی است که فقط نحوه حرکت پاها باعث ثبات این حرکت کاملا سریع شده است، واین نحوه طراحی باعث ساده شدن حرکت شده است. به حدی که ما میتوانیم حتی کمی این حرکت را بر هم بزنیم، همانگونه که در فیلم بعدی خواهید دید، به طوری که مثلا ما کمی تمرین میکنیم و ربات را مجبورمیکنیم از پله پایین برود، و ربات به پایین پرت نخواهد شد، که باعث حیرت ما شد. این یک کمی باعث نگرانی است. من انتظار داشتم که ربات بلافاصله بیافتد، زیرا هیچ حسگر یا هیچ حلقه واکنشی سریع وجود ندارد. اما نیافتاد وفقط ساختار طراحی به آن ثبات بخشید. و ربات نمیافتد. واضح است که اگرپله بزرگتر باشد ومانعی باشد، شما نیازمند حلقهها و رفلکسهای کنترلیکامل و همه چیز هستید. وآنچه مهم است آن است که با کمی نگرانی طراحی درست کار میکند. و به نظر من این یک پیام مهم است از سوی بیومکانیک ورزشی و علوم رباتیک به علوم اعصاب با این مضمون که میزان نقش بدن در حرکت را دست کم نگیرید.
حالا این چه ربطی به حرکت انسان دارد؟ واضح است که حرکت انسان پیچیدهتراز حرکت گربه و سمندراست، اما در عین حال سیستم عصبی انسان بسیارمشابه دیگر مهرهداران است. و به ویژه نخاع که کنترل کننده اصلی برای حرکت انسان است. به همین خاطر است که اگر نخاع اسیب ببیندمیتواند تاثیرات بسیاری داشته باشد. فرد قادر به حرکت پاها یا دست و پاهانخواهد بود. زیرا مغز ارتباط خود را با نخاع از دست میدهد. به ویژه مدولاسیون بالا دستی از دست میرود که باعث آغاز و تغییر حرکت است. لذا هدف بزرگ علم پروتزهای عصبی آن است که ارتباط دوباره از طریق تحریک کنندههای الکتریکی و شیمیایی برقرار گردد. و چندین تیم دردنیا هستند که روی این پروژه کار میکنند به ویژه دردانشگاه فناوری لوزان همکاران من گریگور کورتین و سیلوسترو میسراکه من با آنها همکاری میکنم.
برای انجام صحیح این کار مهم است که بفهمیم نخاع چگونه کار میکند، چگونه با بدن تعامل میکند، و مغز چگونه با نخاع ارتباط برقرار میکند. این جایی است که امیدواریم رباتها و مدلهایی که امروز ارائه دادم در جهت این اهداف بسیار مهم نقش مهمی را ایفاخواهند کرد.
تشکر.
(تشویق)
برونو: آک، من رباتهای دیگری را در آزمایشگاه شما دیدم که میتوانند درآبهای آلوده شنا کنند و میزان آلودگی را اندازه بگیرند. اما برای این یکی شما در صحبتهایتان به یک پروژه جانبی، یعنی جستجو و نجات اشاره کردید، و ربات شما در بخش جلو به دوربین مجهزاست.
آک: بله- خب ربات -- ما پروژههای جانبی داریم که میخواهیم از طریق رباتها عملیات جستجو و نجات انجام دهیم، خب این ربات الان شما را میبیند ورویای بزرگ آن است که اگر شما با یک موقعیت دشوار روبرو شدید مثل ساختمان فروریخته و یا سیل گرفته که بسیار برای تیم نجات و حتی سگها خطرناک هستند، چرا ربات دوربینداری را نفرستیم که میتواند بخزد، راه برود، شنا کند و کار جستجو و نجات زندهها را انجام دهد و احتمالا یک رابط بین نجات یافتگان شود.
برونو: البته با فرض بر اینکه نجات یافتگانازشکل آنها نمیهراسند.
آک : بله ما احتمالا باید شکل آنها را کمی عوض کنیم، چون فکرمیکنم یک نجات یافته از حمله قلبی از نگرانی طعمه این ربات شدن خواهد مرد. اما با تغییر ظاهر و مقاوم کردن آن مطمئن هستم که ابزار خوبی خواهیم داشت.
برونو: تشکر فراوان از شما و تیمتان.