



دنیس هانگ: هفت گونهی روباتهای من
متن سخنرانی :
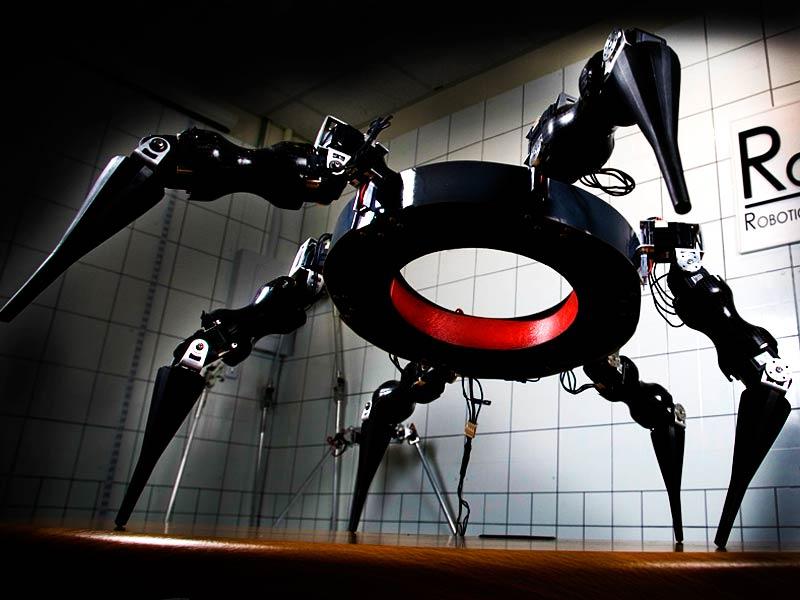
خب اولین روباتی که دربارهی آن صحبت میکنیم اِستریدِر است. به معنی یک روبات خود-تهییج کنندهی متحرکِ آزمایشی با سه پایه. به معنی یک روبات خود-تهییج کنندهی متحرکِ آزمایشی با سه پایه. این یک روباتست که سه پا دارد، که از طبیعت الهام گرفته شده است. اما آیا شما چیزی در طبیعت دیدهاید، جانوری که سه پا داشته باشد؟ احتمالا نه. پس چرا من به آن میگم یک روباتِ الهام گرفته از بیولوژی؟ چگونه حرکت میکند؟ اما قبل از آن بیایید نگاهی به فرهنگ عامه بیاندازیم. خب شما حتما درباره «جنگ دنیاها» از اچ. جی. ولز شنیدهاید، هم رمان و هم فیلمش. و چیزی که اینجا میبینید یک بازی ویدئویی خیلی محبوب است، و چیزی که اینجا میبینید یک بازی ویدئویی خیلی محبوب است، و در این رمان موجوداتی فضایی توصیف میشن که روباتهایی سه پا هستند که کره زمین را در ترس و وحشت فرو میبرند. اما روبات من، اِستریدِر، این طوری حرکت نمیکند.خب، این یک شبیه سازی واقعی با پویانمایی است. من به شما نشان میدهم که روبات چگونه کار میکند. بدنش را ۱۸۰ درجه میچرخاند و یک پایش را از بین دو پای دیگرش تاب میدهد و مانع از افتادن میشود. این روش راه رفتن اوست. اما وقتی به راه رفتن ما نگاه کنید انسانها، دوپاها، کاری که شما میکنید این است که در واقع شما از یک ماهیچه استفاده نمیکنید تا پایتان را بلند کنید و مثل یک روبات راه بروید. درست است؟ کاری که دارید می کنید این است که درواقع پایتان را تاب میدهید و مانع از افتادن میشوید، دوباره بلند میشوید، پایتان را تاب میدهید و مانع از افتادن میشوید. شما از دینامیک درونی و دانش فیزیک خود بدنتان برای این کار استفاده میکنید، درست مانند یک پاندول. ما به این مفهوم دینامیک حرکتِ غیرفعال میگوییم. کاری که شما وقتی بلند میشوید میکنید اینست، تبدیل انرژی پتانسیل به جنبشی، انرژی پتانسیل به جنبشی. این یک روندِ مداومِ سقوط است. خب، گرچه چیزی در طبیعت نیست که این شکلی به نظر برسد، واقعا، ما از شواهد زیست شناسی الهام گرفتهایم و اصول راه رفتن را در این روبات به کار گرفتیم. پس این یک روبات الهام گرفته شده از زیستشناسی است.
چیزی که اینجا میبینید، کاری است که ما میخواهیم در مرحله بعد انجام دهیم. ما میخواهیم پاها را تا کرده و به بالا پرتاب کنیم تا به حرکتِ دور-بُرد دست بیابیم. و این پاها را جوری آرایش میدهد -- تقریبا شبیه «جنگ ستارگان» به نظر میاد - وقتی فرود میآید، تکانه را جذب میکند و شروع به حرکت می کند. چیزی که اینجا میبینید، این چیز زرد، این یک اشعهی مرگبار نیست. (خنده حضار) این تنها به خاطر این است که به شما نشان دهد که اگر دوربین داشته باشید و یا انواع حسگرهای دیگر -- چرا که قد آن بلند است، قدش ۱/۸متر است -- میتوانید آن سوی موانعی مانند بوتهها و این جور چیزها را ببینید.
پس ما دو نمونه داریم. نسخه اول، در عقب، این استرایدر I است. اینی که در جلو است، کوچکتره، استرایدر II است. مشکلی که ما با استرایدر I داشتیم این است که بدنهی آن خیلی سنگین بود. ما تعداد خیلی زیادی موتور داشتیم، میدانید، همتراز کردن مفصلها، و کارهایی از این قبیل. پس ما تصمیم گرفتیم یک ساز و کارِ مکانیکی به کار بگیریم تا بتوانیم از دست آن همه موتور خلاص شویم و فقط با یک موتور ما میتوانیم تمام تحرکات را هماهنگ کنیم. این یک راهکار مکانیکی برای یک مسئله به جای استفاده از مکاترونیک (دانش ترکیبی الکتریسیته و مکانیک) است. خب پس با این تغییر بدنهی بالایی به اندازه کافی سبک شد. خب، این دارد در آزماشیگاه ما راه میرود؛ این دقیقا اولین قدم موفقیتآمیز بود. هنوز کامل نشده -- قهوهاش زمین میریزد -- پس ما هنوز کارهای زیادی برای انجام دادن داریم.
دومین روباتی که میخواهم درباره آن صحبت کنم ایمپاس نام دارد. این نام از «پایگاه تحرک هوشمند با سامانهی پرّههای تحریکپذیر» گرفته شدهاست. راستش، این یک روبات ترکیبی چرخ-پا است. حالا، به یک چرخ بدون زهوار فکر کنید یا یک چرخ پرّهدار، اما پرهها هرکدام مستقلا به بیرون و درون مرکز چرخ حرکت میکنند؛ پس این روبات، ترکیبی از پا و چرخ است. ما اینجا داریم بی کم و کاست چرخ را از اول اختراع میکنیم. بگذارید نشان دهم که چگونه کار میکند. خب، ما در این ویدئو داریم از روشی استفاده میکنیم به نام رویکرد واکنشی. خیلی ساده تنها با استفاده از حسگرهای لمسی در پاها، سعی میکند که از روی یک سطح در حال تغییر عبور کند، یک سطح نرم که به پایین فشرده میشود و تغییر میکند. و فقط با استفاده از اطلاعات لمسی، با موفقیت از روی این نوع سطوح عبور میکند.
اما وقتی به یک سطح خیلی ناهموار برمیخورد، در این مورد، این مانع سه برابر بزرگتر از ارتفاع روبات است، در این مورد، این مانع سه برابر بزرگتر از ارتفاع روبات است، خود را به حالت آگاهانه منتقل میکند، حالتی که در آن از یک لیزر مسافتیاب و سیستمهای دوربین استفاده میکند، تا مانع و ابعاد آن را شناسایی کند، و با برنامهریزی، یک برنامهریزی دقیق بر روی حرکات پرّهها و هماهنگی آنها، میتواند این نوع گونه حرکت بسیار بسیار ستایشبرانگیز را به نمایش بگذارد. و هماهنگی آنها، میتواند این نوع گونه حرکت بسیار بسیار ستایشبرانگیز را به نمایش بگذارد. مطمئنا شما چیزی شبیه این، آن بیرون ندیدهاید. این یک روبات با قابلیت تحرک خیلی بالا است که ما با نام ایمپاس تولید کردهایم. به به! این جالب نیست؟
وقتی شما ماشینتان را میرانید، وقتی فرمان ماشینتان را میچرخانید، شما از تکنیکی استفاده میکنید به عنوان چرخش آکِرمَن. چرخ های جلو شبیه این میچرخند. اکثر روباتهای کوچک چرخدار، از تکنیکی به عنوان چرخش دیفرانسیلی استفاده میکنند که در آن چرخ چپ و راست در جهات متضاد میچرخند. برای ایمپاس ما می توانیم حرکتهای بسیار بسیار زیادی داشته باشیم. مثلا، در این حالت، با این که چرخ چپ و راست به یک محور متصل هستند همزمان با سرعت زاویهای یکسانی میچرخند. ما خیلی ساده فقط طول پرهها را کم و زیاد میکنیم. این در قطر تاثیر گذاشته و سپس میتواند به چپ یا راست بچرخد. خب، اینها فقط چند نمونه از کارهای شسته و رفتهای است که ما می توانیم با ایمپاس انجام دهیم.
به این روبات کلایمبِر میگوییم: روبات دارای رفتار تطبیقی هوشمند با اندام کابلی. خب، من با بسیاری از دانشمندان آزمایشگاه پیشران جت در ناسا صحبت کردهام - در آزمایشگاه پیشران جت آنها به خاطر مریخنوردها معروف هستند -- و دانشمندان، زمین شناسان همیشه به من میگویند که دانش هیجانانگیز واقعی، جایگاههای غنی از دانش، همیشه روی صخرهها هستند. اما پیماگرهای فعلی نمیتوانند به آن نقاط دسترسی داشته باشند. پس، با الهام از این موضوع ما میخواستیم رباتی بسازیم که می تواند در محیطهایی با صخرههای ناهموار بالا برود.
خب، این کلایمبر است. راستش، کاری که می کند: سه پا دارد. البته اینجا درست دیده نمیشود، اما یک جرثقیل و یک کابل در بالا دارد -- و سعی میکند بهترین جایی را که میتواند پایش را بگذارد تشخیص دهد. و سپس به محض آن که فهمید در آنِ واحد، توزیع نیروها را محاسبه میکند: به چقدر نیرو نیاز دارد که به سطح وارد کند تا چپه نشود و سُر نخورد. زمانی که تثبیت شد، یک پایش را بلند میکند. و سپس با استفاده از جرثقیل میتواند از چنین چیزهایی بالا برود. به همین ترتیب در مورد کاربردهای جستجو و نجات.
در حقیقت من پنج سال قبل در آزمایشگاه پیشران جت ناسا در طی تابستان به عنوان عضو هیئت علمی کار می:کردم. و آنها از قبل روباتی شش پا به نام لِمار داشتند. این در اصل بر پایهی آن بنا شده است. این روبات مارس (مریخ) نام دارد. سیستم روباتیک چند-اندامی. بنابراین، این یک روبات ششپا است. ما برنامهریزِ گام برداشتن انطباقی خود را در آن پیاده کردیم. ما در واقع بازدهی خیلی جالبی بر روی آن داریم. دانشجوها دوست دارند کار مفرح باشد. و اینجا شما میبینید که روبات دارد روی سطح هموار حرکت میکند. دارد سعی میکند روی سطح زمخت و خشن راه برود، سطح شنی، اما بر اساس میزان رطوبت و یا اندازهی دانهی شن الگوی نشست خاک برای پا تغییر میکند. یعنی، روبات سعی میکند شیوهی گام برداشتناش را جهت عبور موفقیتآمیز از این سطوح تطبیق بدهد. و همچنین، همانطور که میشود تصور کرد، روبات کارهای جالبی هم انجام میدهد. ما بازدید کنندههای زیادی از آزمایشگاهمان داریم. وقتی بازدید کنندهها میآیند، مارس به سمت کامپیوتر میرود، و شروع میکند به تایپ این که «سلام، نام من مارس است.» به روملا خوش آمدید، به آزمایشگاه ساز و کارهای روباتیک در دانشگاه فنی ویرجینیا.
این یک روبات آمیبی (تک سلولی) است. خب، ما زمان کافی نداریم که وارد جزئیات تکنیکی شویم، من فقط برخی از آزمونها را به شما نشان خواهم داد. خب، این برخی از آزمایشات اولیهی امکان سنجی است. ما انرژی پتانسیل را در پوست کشسان ذخیره میکنیم تا باعث حرکتش شویم. یا از یک ریسمان کششی فعال استفاده کنیم تا آن را به حرکت به جلو و عقب وا داریم. به آن چیمِرا گفته میشود. ما همچنین با برخی دانشمندان و مهندسان از دانشگاه پنسیلوانیا کار کردهایم ما همچنین با برخی دانشمندان و مهندسان از دانشگاه پنسیلوانیا کار کردهایم تا به نسخهای از این روبات تک سلولی که از نظر شیمیایی تحریکپذیر باشد دست یابیم. تا به نسخهای از این روبات تک سلولی که از نظر شیمیایی تحریکپذیر باشد دست یابیم. ما چیزی را به چیزی اعمال میکنیم و مثل شعبده، آن حرکت میکند. حباب.
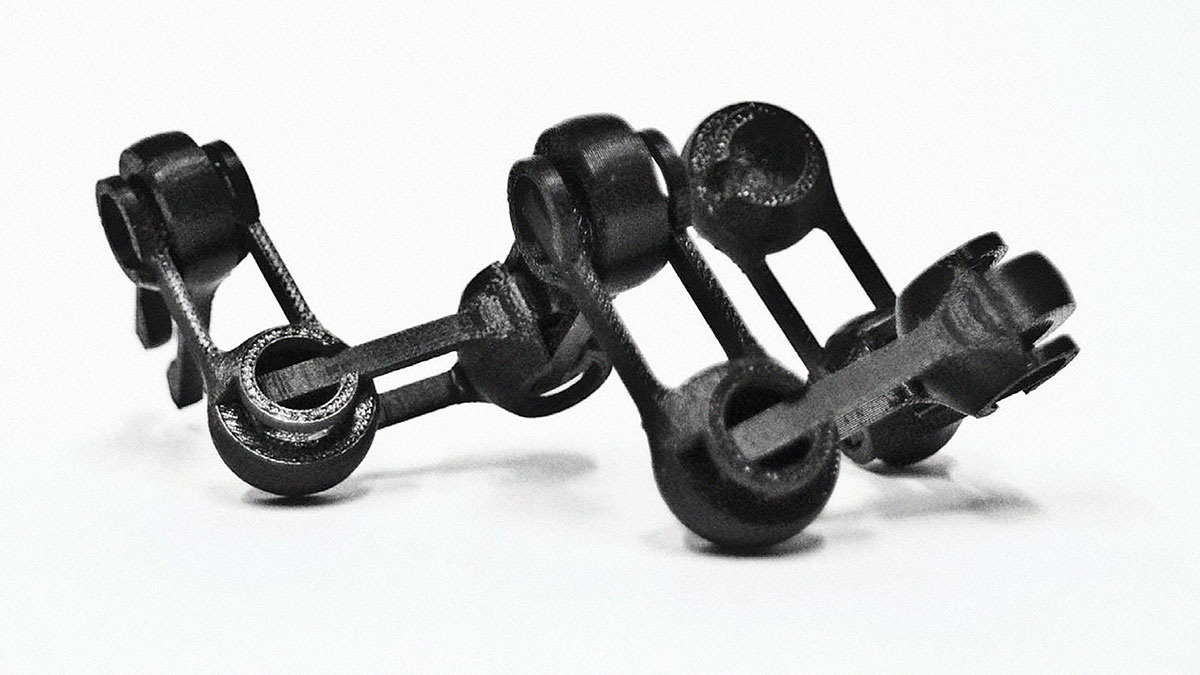
این روبات یک پروژه ی خیلی جدید است و نامش رافائل است. دست روباتیک که با هوا کارمیکند و رباط کشسان دارد. تعداد بسیار زیادی دستهای روباتیک خوب و تر و تمیز در بازار موجود است. مشکل این است که آنها خیلی گران هستند، دهها هزار دلار. پس شاید به عنوان عضو مصنوعی بدن کاربردی نباشند، چون در بضاعت افراد نیستند. ما میخواستیم این مشکل را از جهت دیگری حل کنیم. به جای استفاده از موتورهای الکتریکی، محرکهای الکترو-مکانیکال، ما از هوای فشرده استفاده میکنیم. ما این محرکهای جدید را برای مفصلها ساختیم. آن بسیار قابل انعطاف است. شما در حقیقت خیلی ساده میتوانید با تغییر فشار هوا، نیرو را تغییر بدهید. آن بسیار قابل انعطاف هستند. شما در حقیقت خیلی ساده میتوانید با تغییر فشار هوا، نیرو را تغییر بدهید. و روبات میتواند یک قوطی نوشابه خالی را له کند. و میتواند اجسام خیلی حساس مثل تخممرغ خام را بلند کند. یا در این مورد یک حباب لامپ را. بهترین بخش اینست، هزینهی ساخت نمونهی اولیه فقط ۲۰۰ دلار بود.
این روبات یک خانواده از روباتهای مارگونه است. ما به آن هایدراس میگوییم، مارپیچِ رباتیکِ مفصلیِ فرا درجه-آزادی. این روباتی است که میتواند از سازهها بالا برود. این یک بازوی هایدراس است. این یک بازوی روباتیک با ۱۲ درجهی آزادی است. اما قسمت جالب آن، رابط-کاربری آن است. سیمی که آنجا است، در واقع یک فیبر نوری است. و این دانشجو، احتمالا اولین بار است از آن استفاده میکند، اما او میتواند آن را به حالتهای بسیار گوناگونی همبند کند. خب مثلا در عراق، همانطور که میدانید، منطقه جنگی، بمبهای کنار خیابانی وجود دارد. در حال حاضر شما این روباتهای کنترل از راه دور را می فرستید که مجهز شدهاند. این زمان و هزینهی بسیار زیادی در بر دارد که یک کاربر را آموزش بدهیم که بتواند این دست پیچیده را به کار گیرد. در این مورد، این کار خیلی غریزی انجام میشود: این دانشجو، که احتمالا اولین بارش است که از آن استفاده میکند، کار خیلی پیچیدهای را توسط روبات انجام میدهد. برداشتن اجسام و کار بر روی آنها، درست مانند این. خیلی شهودی.
حالا، این روبات الان ستارهی روباتهای ماست. ما در واقع یک باشگاه طرفداران برای این ربات داریم، داروین: روبات دینامیک انسانوار با هوشمندی. همانطور که میدانید ما خیلی علاقمند به روباتهای انسانوار هستیم، راه رفتن انسانی، پس ما تصمیم گرفتیم که یک روبات کوچک انسانوار بسازیم. این در سال ۲۰۰۴ اتفاق افتاد؛ در آن زمان، این یک روبات خیلی خیلی انقلابی بود. این بیشتر از یک مطالعه ی امکانپذیری بود: از چه نوع موتورهایی باید استفاده کنیم؟ آیا اصلا امکانپذیر هست؟ چه نوع کنترلهایی باید انجام دهیم؟ خب، این هیچ نوع حسگری ندارد. پس درواقع یک کنترل حلقه باز است. برای آنهایی که احتمالا اطلاع دارند، اگر شما هیچ حسگری نداشته باشید اگر هر گونه اختلالی ایجاد شود، میدانید چه اتفاقی میافتد. (خنده حضار)
خب بر اساس آن موفقیت، سال بعد ما طراحی مکانیکی مناسب را شروع کردیم. از جنبششناسی (سینماتیک) شروع کردیم. و در نهایت داروین I در سال ۲۰۰۵ متولد شد. داروین میایستد، راه میرود -- خیلی تاثیرگذار. اما هنوز، همانطور که میبینید، یک سیم به آن وصل است، بند ناف. پس درواقع ما هنوز از منبع انرژی خارجی استفاده میکنیم. و محاسبات خارجی.
بعد، در سال ۲۰۰۶، زمان تفریح فرا رسیده است. بیایید بهش هوشمندی بدهیم. ما به آن تمام نیروی محاسباتی مورد نیاز را خواهیم داد: یک پردازنده ی ۱/۵ گیگا هرتزی پنتیوم اِم، دو دوربین فایروایر، ژیروسکوپ شتابی، شتاب سنج، چهار حسگر نیرو روی پا، باتریهای پلیمر لیتیوم. و حالا داروین II کاملا خودمختار است. از راه دور کنترل نمیشود. هیچ گونه افساری ندارد. به اطراف نگاه میکند، به دنبال توپ میگردد، به اطراف نگاه میکند، به دنبال توپ میگردد، و سعی می کند یک بازی فوتبال انجام دهد، خودمختار: هوش مصنوعی. بگذارید ببینیم چگونه کار میکند. این اولین آزمون ما بود، و ... تماشاچیان (ویدئو): گل!
دنیس هانگ: خب در واقع مسابقهای وجود دارد به اسم روبوکاپ. نمیدانم چند نفر از شما در بارهی روبوکاپ چیزی شنیده. یک مسابقهی بین المللی فوتبال بین روباتهای خودمختار است. و هدف روبوکاپ، هدف اصلیاش این است که، تا سال ۲۰۵۰ میخواهیم یک تیم کامل روباتهای خود مختار انساننما در مقابل تیم فوتبال قهرمانان جهان بازی کند و ببرد. این یک هدف واقعی است. یک هدف خیلی بلندپروازانه است، اما ما حقیقتا اعتقاد داریم که میتوانیم بهش برسیم.
خب، این سال قبل در چین است. ما اولین تیم از آمریکا بودیم که صلاحیت شرکت در مسابقات روبوکاپ انسان نما را داشت. این همین امسال در اتریش است. شما حرکت را میبینید، سه در مقابل سه. کاملا خودمختار. همینه. بله! روباتها ردگیری می کنند و در مقابل یکدیگر حرکت تیمی انجام میدهند. این خیلی تاثیرگذار است. این در حقیقت یک رخداد تحقیقاتی است که در قالب یک مسابقه مهیج درآمده است. چیزی که در اینجا ملاحظه میکنید، این چیز زیبا جایزهی جام لوییس وویتون است. این برای بهترین انسان-نما است. و ما میخواهیم این را برای اولین بار به ایالات متحده بیاوریم. سال بعد، پس برای ما آرزوی موفقیت کنید. (تشویق حضار) متشکرم.
داروین قابلیت های زیاد دیگری هم دارد. سال قبل اون ارکستر سمفونی روانوک را برای کنسرت تعطیلات رهبری کرد. سال قبل اون ارکستر سمفونی روانوک را برای کنسرت تعطیلات رهبری کرد. این روبات نسل بعدی است، داروین IV، اما باهوشتر، سریعتر، قویتر. و سعی میکند تواناییاش را به رخ بکشد: «من ماچو هستم، من قوی هستم. من میتوانم چند حرکت جکی چان را انجام دهم، حرکتهای ورزشهای رزمی.» (خنده حضار) و با قدم زدن دور میشود. پس این داروین IV است. و دوباره، شما میتوانید آن را در لابی ببینید. ما حقیقتا اعتقاد داریم که این اولین ربات انسانوار دونده در آمریکا خواهد بود. پس منتظر خبرها باشید.
بسیار خوب. من برخی از روبات های جالبمان را در محل کار به شما نشان دادم. خب راز موفقیت ما چیست؟ ما از کجا به این ایدهها دست پیدا میکنیم؟ ما چگونه این ایدهها را توسعه میدهیم؟ ما یک خودروی کاملا خودکار داریم که میتواند در محیط های شهری رانندگی کند. ما نیم میلیون دلار در رقابت شهریِ دارپا برنده شدیم. ما همچنین اولین خودرو را در اختیار داریم که میتواند توسط یک فرد نابینا رانده شود. ما آن را رقابت رانندهی نابینا نامیدیم، بسیار هیجانانگیز. و بسیار بسیار پروژههای روباتیک دیگری که میخواهم دربارهی آنها صحبت کنم. اینها جوایزی هستند که ما تنها در پاییز سال ۲۰۰۷ در مسابقات روباتیک و چیزهای مشابه بردهایم.
خب، در واقع، ما پنج راز داریم. اولین: ما از کجا این الهامها را میگیریم؟ ما از کجا این جرقههای خلاقیت را دریافت میکنیم؟ این یک ماجرای واقعی است، داستان شخصی من. شب ها وقتی به رختخواب میروم، ۴-۳ بامداد، دراز میکشم، چشمانم را میبندم، و این خطوط و دایرهها را میبینم و شکلهای مختلفی که در اطراف شناور هستند. و آنها با هم ترکیب میشوند و این نوع ساز و کارها را شکل میدهند. و سپس من فکر میکنم: «آه، این خیلی جالب است.» بنابراین، درست کنار تختخوابم یک دفترچه نگه میدارم، یک دفترچه خاطرات، با یک قلم مخصوص که روی آن چراغ دارد، یک چراغ الایدی، چون نمیخواهم چراغ را روشن کنم و همسرم را از خواب بیدار کنم.
پس من این را میبینم، خرچنگ قورباغه همهچیز را مینویسم، چیزها را می کشم، و به رختخواب میروم. هر روز صبحهنگام، اولین کاری که قبل از اولین لیوان قهوهام میکنم، قبل از مسواک زدن دندانهایم، دفترچهام را باز میکنم. خیلی اوقات آن خالی است، گاهی چیزی آن تو دارم -- اگر چیزی هم باشد، گاهی چرت و پرت است -- اما اکثر اوقات من حتی نمیتوانم دست خط خودم را بخوانم. و خب ۴ صبح چه انتظاری دارید، درسته؟ پس من باید آن چه که نوشتهام رو رمزگشایی کنم. اما گاهی اوقات این ایدهی خارقالعاده رو آنجا میبینم، و من این لحظاتِ «یافتم!» را دارم. مستقیما به دفتر کارم در منزل میروم، پشت کامپیوترم مینشینم، این ایده را تایپ میکنم، جزئیاتش را میکشم و یک پایگاه داده از ایدهها را نگه میدارم. بنابراین، وقتی ما این فراخوانها برای ارائهی طرح را دریافت میکنیم، سعی میکنم یک شباهتهایی بین این ایدههای محتمل و مسئله پیدا کنم. اگر تطابقی وجود داشت ما یک طرح تحقیقاتی ارائه میکنیم، بودجه تحقیقاتی را میگیریم و اینگونه است که برنامههای تحقیقاتیمان را شروع میکنیم.
اما فقط یک جرقهی ایده کافی نیست. ما چگونه این ایدهها را توسعه میدهیم؟ در آزمایشگاهمان روملا، آزمایشگاه روباتیک و مکانیزم، ما این جلسههای فوقالعادهی هماندیشی و چارهجویی گروهی را برگزار میکنیم. خب، ما دور هم جمع میشویم، در بارهی مسایل و مشکلات اجتماعی بحث میکنیم و دربارهشان حرف میزنیم. اما قبل از این که شروع کنیم این قانون طلایی را وضع میکنیم. آن قانون عبارت است از: هیچکسی ایدهی کس دیگری را نکوهش نمیکند. هیچکس هیچ نظری را نکوهش نمیکند. این مهم است، چرا که خیلی وقتها دانشجویان میترسند یا احساس ناراحتی میکنند از این که دیگران ممکن است دربارهی ایده یا نظرشان چه فکری کنند.
پس، همین که این کار را شروع کنید، برای شما جالب خواهد بود که چگونه دانشجویان از حالت دفاعی خارج میشوند. آنها این ایدههای عجیب، جالب، غیر قابل باور، هوشمندانه را در اختیار دارند، و تمام اتاق را برق انرژی خلاقانه میگیرد. و این گونه است که ما ایدههایمان را توسعه میدهیم.
خب زمان ما دارد تمام میشود. یک چیز دیگری که من میخواهم در بارهی آن صحبت کنم این است که، میدانید، اینکه فقط یک ایده در ذهنتان جرقه بزند و آن را گسترش بدید کافی نیست. یک لحظهی باشکوه در TED داشتیم، فکر می کنم سِر کِن رابینسون بود، درسته؟ او سخنرانیای ارائه کرد در مورد این که چگونه آموزش و مدرسهها خلاقیتها را می کُشد. خب، در واقع، دو رو برای این ماجرا هست. خب، کاری که یک نفر میتواند انجام دهد با ایدههای مبتکرانه و خلاقیت و بینش خوب مهندسی بسیار زیاد است. اگر میخواهید فراتر از یک سرهمبندی کردن کاری صورت دهید، اگر میخواهید فراتر ازسرگرمی در روباتیک پیش بروید و حقیقتا با مسائل بزرگ روباتیک با تحقیقات بسیار وسیع دست و پنجه نرم کنید و حقیقتا با مسائل بزرگ روباتیک با تحقیقات بسیار وسیع دست و پنجه نرم کنید ما به چیزی فراتر از آن نیاز داریم. این جاییست که مدرسه وارد صحنه میشود.
بتمن، که در مقابل آدم بدها مبارزه میکند، او کمربند ابزارآلاتش را دارد، او قلاب چنگکیاش را دارد. او انواع و اقسام وسایل را دارد. برای ما روبات بازها و مهندسان و دانشمندان، این ابزارآلات، درسها و کلاسهایی هستند که به عهده میگیریم. ریاضی، معادلات دیفرانسیل. من جبرخطی، علوم، فیزیک، و حتی این روزها همانطور که دیدید، شیمی و زیستشناسی دارم. اینها تمام ابزارهایی هستند که ما به آنها نیاز داریم. پس هرچه ابزارهای بیشتری داشته باشید، بتمن، در مبارزه برابر آدم های بد موثرتر خواهد بود، و ما، ابزارهای بیشتری برای حمله به این مشکلات بزرگ خواهیم داشت. پس، آموزش خیلی مهم است.
و همچنین، فقط این نیست، فقط داستان این نیست. شما همچنین باید خیلی خیلی سخت کار کنید. خب من همیشه به دانشجویانم میگویم، «هوشمندانه کار کنید، سپس زیاد کار کنید.» تصویر پشت سر من ساعت ۳ صبح را نشان میدهد. من مطمئنم اگر شما در ساعت ۴-۳ صبح به آزمایشگاهتان بیایید ما دانشجویانی داریم که آنجا کار میکنند، نه به خاطر این که من به آنها میگویم، بلکه به خاطر این که به ما آنجا خیلی خوش میگذرد. که این ما را به واپسین موضوع هدایت میکند: فراموش نکنید که خوش بگذرانید. این حقیقتا راز موفقیت ما است، به ما خیلی زیاد خوش میگذرد. من واقعا معتقدم که بیشترین کارایی زمانی خواهد بود که به شما خوش بگذرد، و این همان کاری است که ما داریم میکنیم. این هم برای شما. خیلی از شما متشکرم. (تشویق حضار)